一个 CORDIC (代表 **CO**ordinate **R**otation **DI**gital **C**omputer) 电路用于计算一些常见的数学函数,例如三角函数、双曲函数、对数函数和指数函数。
CORDIC 只使用加法器和位移来计算结果,因此它可以使用相对基本的硬件实现。
像幂级数或查表法通常需要执行乘法。如果硬件乘法器不可用,CORDIC 通常更快,但如果可以使用乘法器,其他方法可能更快。
CORDIC 可以用多种方法实现,包括单级迭代方法,与乘法器电路相比,它需要很少的门。此外,CORDIC 可以使用完全相同的硬件计算许多函数,因此它们非常适合那些将降低成本(例如通过减少 FPGA 中的门数)优先于速度的应用。这种优先级的一个例子是袖珍计算器,其中 CORDIC 被广泛使用。
CORDIC 最初是由 J.E. Volder 于 1959 年在康维尔航空电子部门发明的,它被设计用于 B-58 轰炸机的导航计算机,以取代模拟分解器,一种计算三角函数的设备(圆 CORDIC)。
1971 年,惠普的 J.S. Walther 将该方法扩展到计算双曲函数、自然对数、自然指数、乘法、除法和平方根(线性 CORDIC 和双曲 CORDIC)。
2019 年,基于双曲 CORDIC,罗元勇等人进一步提出了一种广义双曲 CORDIC (GH CORDIC) 来直接计算具有任意固定基数的对数和指数。理论上,双曲 CORDIC 是 GH CORDIC 的特例。
考虑以下向量的旋转

|

|
- 从 (1, 0) 开始
- 旋转 θ
- 我们得到 (cosθ, sinθ)
|
- 从 (1, y) 开始
- 旋转直到 y = 0
- 旋转是 tan−1y
|
如果我们有一个计算效率高的向量旋转方法,我们可以直接计算正弦、余弦和反正切函数。但是,任意角度的旋转并不容易(你必须知道正弦和余弦,而这正是我们所没有的)。我们使用两种方法来简化它
- 我们不执行旋转,而是执行“伪旋转”,它们更容易计算。
- 用一组特殊角度 αi 的和来构造所需的角度 θ

下图显示了长度为 Ri 的向量绕原点旋转 ai 角的旋转和伪旋转
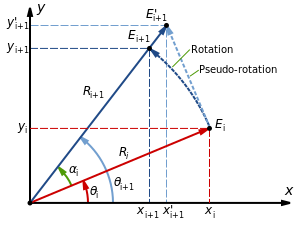
绕原点旋转产生以下坐标



回想一下身份  .
.


我们的策略是消除因子  ,并设法消除乘以
,并设法消除乘以  。伪旋转生成一个与旋转向量具有相同角度但长度不同的向量。事实上,伪旋转将长度更改为
。伪旋转生成一个与旋转向量具有相同角度但长度不同的向量。事实上,伪旋转将长度更改为

因此,我们现在有以下伪旋转后的坐标



伪旋转成功地消除了我们的长度因子,而长度因子本来需要一个代价高昂的除法运算。然而,向量将在n个伪旋转序列中增长K倍

然后,经过n个伪旋转后的坐标为



 前三次伪旋转。注意我们如何收敛到正确的角度,θ
前三次伪旋转。注意我们如何收敛到正确的角度,θ
如果角度总是相同的集合,那么 K 是固定的,可以在以后考虑。我们根据两个标准选择这些角度
- 我们还必须选择角度,以便任何角度都可以通过所有角度的总和来构建,并带有适当的符号。
- 我们将所有 设置为 2 的幂,以便乘法可以通过二进制数的简单逻辑移位来执行。
正切函数在区间 [0, π/2] 上具有单调递增的梯度,因此给定角度的正切始终小于该角度的一半正切的两倍。这意味着如果我们使角度  ,我们可以满足这两个标准。请注意,正切函数是奇函数,这意味着要以另一种方式进行伪旋转,您只需减去而不是添加角度的正切。
,我们可以满足这两个标准。请注意,正切函数是奇函数,这意味着要以另一种方式进行伪旋转,您只需减去而不是添加角度的正切。
| i |
αi = tan−1 (2−i) |
| 度 |
弧度 |
| 0 |
45.00 |
0.7854
|
| 1 |
26.57 |
0.4636
|
| 2 |
14.04 |
0.2450
|
| 3 |
7.13 |
0.1244
|
| 4 |
3.58 |
0.0624
|
| 5 |
1.79 |
0.0312
|
| 6 |
0.90 |
0.0160
|
| 7 |
0.45 |
0.0080
|
| 8 |
0.22 |
0.0040
|
| 9 |
0.11 |
0.0020
|
在过程的步骤 i 中,我们以  进行伪旋转,其中
进行伪旋转,其中  是旋转的方向(或符号),这将在每一步都选择,以迫使角度收敛到所需的最终旋转。例如,考虑 28° 的旋转
是旋转的方向(或符号),这将在每一步都选择,以迫使角度收敛到所需的最终旋转。例如,考虑 28° 的旋转


我们采取的步骤越多,我们就可以通过连续旋转来进行更好的近似。因此,我们有以下迭代坐标计算



为了达到k位的精度,需要进行k次迭代,因为 ,随着i的增加而收敛。
,随着i的增加而收敛。

CORDICs可以用来计算许多函数。一个CORDIC有三个输入,x0, y0和z0。根据CORDIC的输入,可以在输出xn, yn和zn产生不同的结果。
为了使zn收敛到0,选择 .
.
如果我们从x0 = 1/K和y0=0开始,在过程结束时,我们会发现xn=cos z0和yn=sin z0。
收敛域是 ,因为99.7°是列表中所有角度的总和。
,因为99.7°是列表中所有角度的总和。
为了使yn收敛到0,选择 .
.
如果我们从x0 = 1和z0 = 0开始,我们会发现zn=tan−1y0

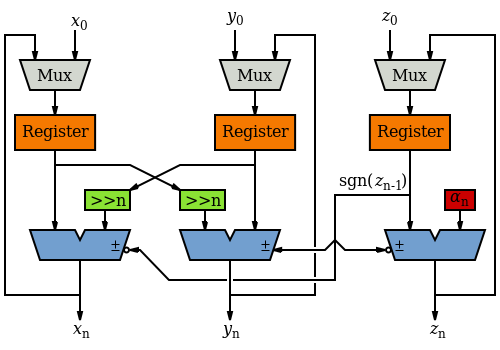
如果不需要高速,可以使用一个加法器和一个移位器实现。
通过引入因子μ,我们也可以满足线性函数和双曲函数的需求。



|

|

|

|

|

|

|

|

|

|

|

|
除了上述函数外,还可以通过组合先前计算结果来生成许多其他函数。

|

|

|

|

|

|

|

|
|
|

|
|
|

|
- Volder, J.E. (1959), "CORDIC 三角函数计算技术" (PDF), IRE 电子计算机学报, 8 (3): 330–334, 检索于 2009-06-02
- Walther, J.S. (1971), "基本函数的统一算法" (w), 1971 年 5 月 18 日至 20 日春季联合计算机大会论文集: 379–385, 检索于 2009-06-02
- 罗元勇,王雨轩,哈亚军,王忠锋,陈思远,潘洪兵 (2019),"广义双曲 CORDIC 及其任意固定基数的对数和指数计算",IEEE 超大规模集成电路 (VLSI) 系统汇刊,27 (9): 2156–2169,doi:10.1109/TVLSI.2019.2919557 CS1 maint: multiple names: authors list (link)
- Vladimir Baykov,基于逐位 (CORDIC) 技术的基本函数评估问题,博士论文,列宁格勒国立电气工程大学,1972 年
- Schmid, Hermann,十进制计算。纽约,Wiley,1974 年
- V.D.Baykov,V.B.Smolov,计算机中基本函数的硬件实现,列宁格勒国立大学,1975 年,96 页。*全文
- Senzig, Don,计算器算法,IEEE Compcon 阅读摘要,IEEE 目录号 75 CH 0920-9C,第 139-141 页,IEEE,1975 年。
- V.D.Baykov,S.A.Seljutin,微型计算器中的基本函数评估,莫斯科,Radio & svjaz,1982 年,64 页。
- Vladimir D.Baykov,Vladimir B.Smolov,专用处理器:迭代算法和结构,莫斯科,Radio & svjaz,1985 年,288 页
- M. E. Frerking,通信系统中的数字信号处理,1994 年
- Vitit Kantabutra,关于计算指数和三角函数的硬件,IEEE 计算机汇刊 45 (3),328-339 (1996)
- Andraka, Ray,基于 FPGA 计算机的 CORDIC 算法调查
- Henry Briggs,对数算术。伦敦,1624 年,对开本
- CORDIC 文献网站,王少云,2011 年 7 月
- 算法的秘密,Jacques Laporte,巴黎 1981 年
- 逐位方法,Jacques Laporte,巴黎 2006 年
- Ayan Banerjee,基于 CORDIC 的生物医学信号处理 FFT 处理器的 FPGA 实现,卡拉格浦尔,2001 年
- CORDIC 架构:综述,B. Lakshmi 和 A. S. Dhar,期刊:VLSI 设计,2010 年 1 月
- 在数字下变频器中实现 CORDIC 算法,C. Cockrum,2008 年秋季
- Parhami, B. (1999),计算机算术:算法和硬件设计












.svg)
.svg)







