扫雷船上指向 水听器 阵列的阻尼控制系统,从传动轴到阵列的开环传递函数如下。

增益参数 K 可以改变。阵列的惯性矩 J 和水对阵列的粘性阻力产生的力 Kd 是已知常数,给出如下


- 该系统被安排为具有单位反馈的闭环系统。找到 K 的值,使得当输入为单位阶跃时,闭环响应的过冲量最多为 50%(大约)。您可以使用标准响应曲线。为了减少过冲量,K 应该大于还是小于该值?
- 找到系统相应的时域响应。
- 现在,系统接收恒定角速度 V 的输入。对于上面找到的 K 的极限值,计算 V 的最大值,使得阵列最多以 5° 的误差跟随输入。
首先,让我们绘制系统的框图。我们知道开环传递函数,并且存在单位反馈。因此,我们有
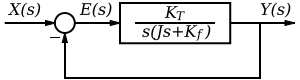
闭环增益由下式给出
 |

|
| |

|
| |

|
现在我们需要将闭环传递函数表示为标准二阶形式。
 |
|
| |

|
现在我们可以表示自然频率 ωn 和阻尼比 ζ



现在我们看看二阶系统的标准响应曲线。
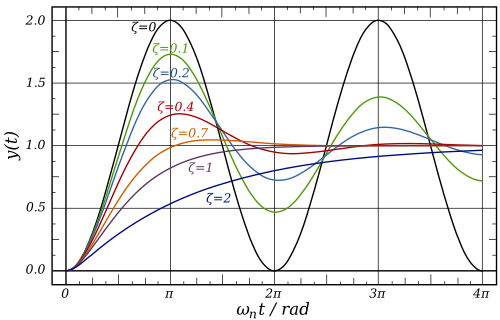
我们看到,对于 50% 的过冲,我们需要 ζ=0.2 或更大。


这是允许的最大值,因此为了减少过冲,K 应该小于此值。现在我们可以完全评估自然频率。

二阶系统的输出由以下等式给出。
 |

|
| |

|
| |

|
我们可以绘制该系统的输出。

跟踪误差信号 E(s) 等于输出偏离输入。

现在,我们可以找到参考输入 R(s) 到误差跟踪信号的增益。

类似这样的单位反馈系统的输入到误差跟踪信号的增益仅仅是  .
.
 |

|
| |

|
现在,R(s) 由斜率为V 的斜坡的拉普拉斯变换给出

我们现在使用最终值定理来寻找稳态下E(s) 的值
 |

|
| |

|
| |

|
我们需要这个值小于 





