
分形/多重布洛特集
多项式函数的朱利亚集
-
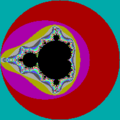
 z^2+z^3+c 分形中的大象区
z^2+z^3+c 分形中的大象区 -
根

"由于 博特切尔定理[1],多项式的动力学比一般有理映射的动力学更容易理解。
映射 有 d 个花瓣。"虽然 z = 0 处的抛物点只有一个花瓣,但映射 f 也在局部度数为 d 的地方有一个前抛物临界点 b = −1。因此 f 在 b 处有 d 个花瓣。" [2]

例如,“f (z) = z(1 + z) 3 的填充朱利亚集在 z = −1 处有三个花瓣。”(Curtis T McMullen)
"条件

描述了一组穿过原点的直线。注意映射 g

使这些直线保持不变。那么

是 g 与周期旋转的复合。”[3]

例子
- f(z) = z^3 + z + 0.6*I[4]
- f(z) = z^6+A*z +c ; 度数为 6,A=(-34603008+0*i)*2^-25,c=(-262144+0i)*2^-25 来自另一个参数空间切片,显示了 marcm200 的 5 个吸引周期-2 循环[5]
- "伦敦塔" 周期-3 循环和周期-18 循环,z^5+A*z+c c=(638976+7536640*i) * 2^-25 A=(37094161+719769*i) * 2^-25 来自 marcm200[6]
Z = Zn + cp
L = (m - 1) * p
-
 Z = Z2 + C2
Z = Z2 + C2
L = (2 - 1)* 2 = 2 -
 Z = Z2 + C3
Z = Z2 + C3
L = (2 - 1)* 3 = 3 -
 Z = Z2+C6 - 1
Z = Z2+C6 - 1
L = (2 - 1)* 6 = 6 -
 Z = Z3 + C2
Z = Z3 + C2
L = (3 - 1)* 2 = 4 -
 Z = Z3 + C3
Z = Z3 + C3
L = (3 - 1)* 3 = 6 -
 Z = Z4 + C4
Z = Z4 + C4
L = (4 - 1)* 4 = 12








"the mulitbrot family, ... they all have a single critical point, namely the origin" Mark McClure [7]
L = m - 1
与它的逆参数平面比较:Z^n + 1/c [12]
如何计算 z 的幂


















Fortran 源代码
! Fortran program by P.M.J. Trevelyan
! http://philiptrevelyan.co.uk/
PROGRAM FRACTAL
IMPLICIT NONE
INTEGER I,J,ITERATION,N,M
PARAMETER(N=2000,M=50)
REAL*8 U,V,X,Y,P,Q
OPEN(99,FILE='Fractal_quad.dat')
25 FORMAT(2F9.5,I3)
DO 10, I=1,N
DO 20, J=1,N
C Define first point z(n)=U+iV and k=X+iY
U=0.D0
V=0.D0
X=I*3.2D0/(N-1.D0)-2.1D0
Y=J*2.8D0/(N-1.D0)-1.4D0
DO 30, ITERATION=1,M
C Calculate z(n+1) = z(n)**2 + k where z(n+1)=P+iQ
P=U**2-V**2+X
Q=2.D0*U*V+Y
U=P
V=Q
C If |z|>2 stop iterating
If (U**2+V**2.GT.4.D0) GOTO 100
30 CONTINUE
100 WRITE(99,25) X,Y,ITERATION
20 CONTINUE
10 CONTINUE
STOP
END
正整数幂的参数平面
-
 z2 + c
z2 + c -
 z3 + c
z3 + c -
 z4 + c
z4 + c -
 z5 + c
z5 + c -
 z6 + c
z6 + c





负幂
当 d 为负数时,该集合包围但不包含原点。在集合和原点之间的等高线之间存在有趣的复数行为,在一个具有 (1 − d)-重旋转对称性的星形区域内。这些集合似乎具有圆形周长,但是这仅仅是逃逸时间算法允许的固定最大半径的人为现象,而不是实际上在所有方向上延伸到无穷大的集合的极限。
-
 z−2 + c
z−2 + c -
 z−3 + c
z−3 + c -
 z−4 + c
z−4 + c -
 z−5 + c
z−5 + c -
 z−6 + c
z−6 + c





参见 复二次多项式

它可以计算为 :[13]


示例
- c= -0.040000000000000036 + I * -0.78[14]
-
参数平面和曼德勃罗集
-
 动态平面和Julia集,其中,其中c = ?
动态平面和Julia集,其中,其中c = ? -
 复平面上函数 的零点
复平面上函数 的零点 -
 复平面上函数 的复色图
复平面上函数 的复色图 -

-
 c = -0.4730679 -0.5625i
c = -0.4730679 -0.5625i







z^5 + c
[edit | edit source]-
参数平面和曼德勃罗集
-
 复平面上函数 的零点
复平面上函数 的零点 -
 复平面上函数 的复色图
复平面上函数 的复色图 -




z^10 + c
[edit | edit source]-
 使用 z = z^10 + c 且 c = -0.925 + 0.19i 的Julia集分形
使用 z = z^10 + c 且 c = -0.925 + 0.19i 的Julia集分形

zn + 1/c
[edit | edit source]它是 z^n + c 的 反转参数平面。
顶点数 : V = (n - 1)
-
 Z = Z2 + 1/C
Z = Z2 + 1/C -
 Z = Z3 + 1/C
Z = Z3 + 1/C -
 Z = Z4 + 1/C
Z = Z4 + 1/C -
 Z = Z5 + 1/C
Z = Z5 + 1/C -
 Z = Z6 + 1/C
Z = Z6 + 1/C -
 Z = Z7 + 1/C
Z = Z7 + 1/C






z^n + m*z^(-d)
[edit | edit source]麦克穆伦映射

其中 : n 和 d 大于等于 1
"这些映射被称为`麦克穆伦映射',因为麦克穆伦[15] 首次研究了这些映射,并指出当 (n: d) = (2: 3) 且 m 很小时,Julia 集是一个圆形的康托尔集。" [16]
z^n + m*z
[edit | edit source]z^2+m*z
[edit | edit source]参见 复二次多项式
z^3+m*z
[edit | edit source]动态平面
[edit | edit source]%3D_z%5E3%2B(1.0149042485835864102%2B0.10183008497976470119i)*z.png)
_%3D_z%5E3_%2Bz*(0.1008317508132964*i_%2B_1.004954206930806).png)
z^3 + z
[edit | edit source]它可以使用Maxima CAS找到
(%i2) z:zx+zy*%i; (%o2) %i*zy+zx (%i6) realpart(z+z^3); (%o6) -3*zx*zy^2+zx^3+zx (%i7) imagpart(z+z^3); (%o7) -zy^3+3*zx^2*zy+zy
寻找根及其重数


所以根 z=0 的重数为 3。
(%i1) z1:z^3+z; (%o1) z^3+z (%i2) solve(z1=z); (%o2) [z=0] (%i3) multiplicities; (%o3) [3]
这意味着在不动点 z=0 附近有一个 2 个花瓣的花。
比较图表
如何计算迭代
(%i1) z:zx+zy*%i; (%o1) %i*zy+zx (%i2) m:mx+my*%i; (%o2) %i*my+mx (%i3) z1:z^4+m*z; (%o3) (%i*zy+zx)^4+(%i*my+mx)*(%i*zy+zx) (%i4) realpart(z1); (%o4) zy^4-6*zx^2*zy^2-my*zy+zx^4+mx*zx (%i5) imagpart(z1); (%o5) -4*zx*zy^3+4*zx^3*zy+mx*zy+my*zx
参见 f(z) = c(z^4-4z)。它是沃尔夫·荣格的程序 Mandel 中的家族 4.1[21](参见主菜单 / 新建 / 4. 四次多项式 / 4.1)
这里 c = -m/4 并且曼德布罗特集合旋转了 180 度。
_%3D_z%5E4_%2B_m*z.png)
Maxima CAS 代码
(%i1) f:z^4+m*z; (%o1) z^4+m*z (%i2) e1:f=z; (%o2) z^4+m*z=z (%i3) d:diff(f,z,1); (%o3) 4*z^3+m (%i4) e2:d=w; (%o4) 4*z^3+m=w (%i5) s:eliminate ([e1,e2], [z]); (%o5) [-(m-w)*(w+3*m-4)^3] (%i6) s:solve([s[1]], [m]); (%o6) [m=-(w-4)/3,m=w]
这意味着有两个周期 1 分量
- 一个半径 = 1 且中心 = 0 (m=w)
- 第二个半径为 1/3 且中心为 4/3 (m=-(w-4)/3)
_%3D_z%5E4_%2B_z.png)
寻找根及其重数


所以根 z=0 的重数为 4。
(%i1) z1:z^4+z; (%o1) z^4+z (%i2) solve(z1=z); (%o2) [z=0] (%i3) multiplicities; (%o3) [4]
这意味着在固定点 z=0 周围有 3 个花瓣[22]
如何计算迭代
(%i17) z:x+y*%i; (%o17) %i*y+x (%i18) realpart(z+z^4); (%o18) y^4-6*x^2*y^2+x^4+x (%i19) imagpart(z+z^4); (%o19) -4*x*y^3+4*x^3*y+y
%3Dz%5E4-iz.png)
首先计算内部角 = 3/4 的乘子
(%i1) m:exp(2*%pi*%i*3/4); (%o1) -%i
然后找到如何计算迭代
(%i1) z:x+y*%i; (%o1) %i*y+x (%i2) z1:z^4-%i*z; (%o2) (%i*y+x)^4-%i*(%i*y+x) (%i3) realpart(z1); (%o3) y^4-6*x^2*y^2+y+x^4 (%i4) imagpart(z1); (%o4) -4*x*y^3+4*x^3*y-x
这是一个具有 12 个花瓣花的抛物线朱利亚集合[23]
临界点
(%i12) s:GiveListOfCriticalPoints(f(z)) (%o12) [0.31498026247372*%i-0.54556181798586,-0.62996052494744*%i,0.31498026247372*%i+0.54556181798586] (%i13) multiplicities (%o13) [1,1,1] (%i14) length(s) (%o14) 3
以转数为参数
[0.41666666666667,0.75,0.083333333333334] = [5/12 , 9/12, 1/12]
吸引向量
固定点 -i 的乘子是单位根的四次方根 (q=4),因此我们检查第四次迭代
(%i1) z1:z^4-%i*z; (%o1) z^4-%i*z (%i2) z2:z1^4-%i*z1; (%o2) (z^4-%i*z)^4-%i*(z^4-%i*z) (%i3) z3:z2^4-%i*z2; (%o3) ((z^4-%i*z)^4-%i*(z^4-%i*z))^4-%i*((z^4-%i*z)^4-%i*(z^4-%i*z)) (%i4) z4:z3^4-%i*z3; (%o4) (((z^4-%i*z)^4-%i*(z^4-%i*z))^4-%i*((z^4-%i*z)^4-%i*(z^4-%i*z)))^4-%i*(((z^4-%i*z)^4-%i*(z^4-%i*z))^4-%i*((z^4-%i*z)^4-%i*(z^4-%i*z))) (%i6) taylor(z4,z,0,20); (%o6)/T/ z+(-76*%i-84)*z^13+(-36*%i+720)*z^16+(1812*%i-2556)*z^19+...
z 之后的下一项是
(-76*%i-84)*z^13
所以这里
- k=13 且 n=m*q = k-1 = 12
- a = -76*%i-84
吸引向量满足

所以这里


可以在 Maxima CAS 中解决
(%i14) s:map('float,s);
(%o14) [1.007236559448514*%i+1.521106958434882,1.632845927320289*%i+0.81369898815363,
1.820935547602145*%i-0.11173896888541,1.521106958434882*%i-1.007236559448514,
0.81369898815363*%i-1.632845927320289,
-0.11173896888541*%i-1.820935547602145,-1.007236559448514*%i-1.521106958434882,
-1.632845927320289*%i-0.81369898815363,0.11173896888541-1.820935547602145*%i,
1.007236559448514-1.521106958434882*%i,
1.632845927320289-0.81369898815363*%i,0.11173896888541*%i+1.820935547602145]
以转数为参数
[0.093087406197659,0.17642073953099,0.25975407286433,0.34308740619766,0.42642073953099,0.50975407286433, 0.59308740619766,0.67642073953099,0.75975407286433,0.84308740619766,0.92642073953099,0.009754072864326]
不同于临界点的参数。因此,临界轨道形成扭曲的 12 臂星
找到固定点
(%i1) f:z^4-%i*z;
(%o1) z^4-%i*z
(%i2) s:solve(f=z);
(%o2) [z=((%i+1)^(1/3)*(sqrt(3)*%i-1))/2,z=-((%i+1)^(1/3)*(sqrt(3)*%i+1))/2,z=(%i+1)^(1/3),z=0]
(%i4) multiplicities;
(%o4) [1,1,1,1]
(%i3) s:map(rhs,s);
(%o3) [((%i+1)^(1/3)*(sqrt(3)*%i-1))/2,-((%i+1)^(1/3)*(sqrt(3)*%i+1))/2,(%i+1)^(1/3),0]
(%i5) s:map('float,s);
(%o5) [0.5*(%i+1.0)^(1/3)*(1.732050807568877*%i-1.0),-0.5*(%i+1.0)^(1/3)*(1.732050807568877*%i+1.0),(%i+1.0)^(1/3),0.0]
(%i6) s:map(rectform,s);
(%o6) [0.7937005259841*%i-0.7937005259841,-1.084215081491351*%i-0.29051455550725,0.29051455550725*%i+1.084215081491351,0.0]
计算固定点的乘子
(%i7) d:diff(f,z,1); (%o7) 4*z^3-%i
检查固定点的稳定性
(%i9) for z in s do disp(abs(ev(d))); 4.999999999999998 5.0 4.999999999999999 1 (%o9) done
点 z=0 是一个抛物线点。
%3Dz%5E4-z.png)
_%3D_z%5E4_-_z.png)
_%3D_z%5E4_-_z_with_various_number_of_star_branches.gif)
它是家族多项式的特例

这里

所以内部角 是


(%i2) m:exp(2*%pi*%i/2); (%o2) -1
因为

它是一个抛物线朱利亚集合。点 位于两个周期一组件(根点)之间。
周期点
点 z=0 是七重根

对于方程

可以使用 Maxima CAS 的数值方法和符号方法进行验证。
(%i1) z1:z^4-z; (%o1) z^4-z (%i2) z2:z1^4-z1; (%o2) (z^4-z)^4-z^4+z (%i3) eq2:z2-z=0; (%o3) (z^4-z)^4-z^4=0 (%i4) allroots(eq2); (%o4) [z=0.0,z=0.0,z=0.0,z=0.0,z=0.0,z=0.0,z=0.0,z=1.259921049894873, z=0.7937005259841*%i-0.7937005259841,z=-0.7937005259841*%i-0.7937005259841, z=1.084215081491351*%i-0.29051455550725,z=-1.084215081491351*%i-0.29051455550725, z=0.29051455550725*%i+1.084215081491351, z=1.084215081491351-0.29051455550725*%i,z=1.091123635971722*%i-0.62996052494744, z=-1.091123635971722*%i-0.62996052494744] (%i5) expand(eq2); (%o5) z^16-4*z^13+6*z^10-4*z^7=0 (%i6) factor(eq2); (%o6) z^7*(z^3-2)*(z^6-2*z^3+2)=0
(%i1) z1:z^4-z; (%o1) z^4-z (%i2) solve(z1=z); (%o2) [z=(2^(1/3)*sqrt(3)*%i-2^(1/3))/2,z=-(2^(1/3)*sqrt(3)*%i+2^(1/3))/2,z=2^(1/3),z=0] (%i3) multiplicities; (%o3) [1,1,1,1] (%i4) z2:z1^4-z1; (%o4) (z^4-z)^4-z^4+z (%i5) solve(z2=z); (%o5) [z=(2^(1/3)*sqrt(3)*%i-2^(1/3))/2,z=-(2^(1/3)*sqrt(3)*%i+2^(1/3))/2,z=2^(1/3),z=((%i+1)^(1/3)*(sqrt(3)*%i-1))/2,z=-((%i+1)^(1/3)*(sqrt(3)*%i+1))/2,z=(%i+1)^(1/3),z=(sqrt(3)*(1-%i)^(1/3)*%i-(1-%i)^(1/3))/2,z=-(sqrt(3)*(1-%i)^(1/3)*%i+(1-%i)^(1/3))/2,z=(1-%i)^(1/3),z=0] (%i6) multiplicities; (%o6) [1,1,1,1,1,1,1,1,1,7]
花瓣数 = 6 [24]

吸引向量 内角分母 是 ,所以需要检查函数的第二次迭代。

(%i5) z1:z^4-z; (%o5) z^4-z (%i6) z2:z1^4-z1; (%o6) (z^4-z)^4-z^4+z (%i8) expand(z2); (%o8) z^16-4*z^13+6*z^10-4*z^7+z
z 后面的下一个项是 -4z^7。然后
- k = 7,n=m*q = k-1 = 6
- a = -4
吸引向量满足
所以这里


可以使用 Maxima CAS 来解决。
(%i10) s:solve(z^6=1/24);
(%o10) [z=(sqrt(3)*%i+1)/(2^(3/2)*3^(1/6)),z=(sqrt(3)*%i-1)/(2^(3/2)*3^(1/6)),z=-1/(sqrt(2)*3^(1/6)),z=-(sqrt(3)*%i+1)/(2^(3/2)*3^(1/6)),z=-(sqrt(3)*%i-1)/(2^(3/2)*3^(1/6)),z=1/(sqrt(2)*3^(1/6))]
(%i11) s:map(rhs,s);
(%o11) [(sqrt(3)*%i+1)/(2^(3/2)*3^(1/6)),(sqrt(3)*%i-1)/(2^(3/2)*3^(1/6)),-1/(sqrt(2)*3^(1/6)),-(sqrt(3)*%i+1)/(2^(3/2)*3^(1/6)),-(sqrt(3)*%i-1)/(2^(3/2)*3^(1/6)),1/(sqrt(2)*3^(1/6))]
(%i12) s:map('float,s);
(%o12) [0.29439796075012*(1.732050807568877*%i+1.0),0.29439796075012*(1.732050807568877*%i-1.0),-0.58879592150024,-0.29439796075012*(1.732050807568877*%i+1.0),-0.29439796075012*(1.732050807568877*%i-1.0),0.58879592150024]
(%i13) s:map(rectform,s);
(%o13) [0.50991222566388*%i+0.29439796075012,0.50991222566388*%i-0.29439796075012,-0.58879592150024,-0.50991222566388*%i-0.29439796075012,0.29439796075012-0.50991222566388*%i,0.58879592150024]
(%i14) s:map(carg_t,s);
(%o14) [0.5235987755983/%pi,1.047197551196598/%pi,1/2,1-1.047197551196598/%pi,1-0.5235987755983/%pi,0]
(%i15) s:map('float,s);
(%o15) [0.16666666666667,0.33333333333333,0.5,0.66666666666667,0.83333333333333,0.0]
所以临界点位于吸引向量上。因此,临界轨道在迭代下会直线趋向原点。 [25]
如何计算

(%i2) z:x+y*%i; (%o2) %i*y+x (%i3) realpart(z^4-z); (%o3) y^4-6*x^2*y^2+x^4-x (%i4) imagpart(z^4-z); (%o4) -4*x*y^3+4*x^3*y-y
临界点
s:GiveListOfCriticalPoints(f(z)) (%o8) [0.54556181798586*%i-0.31498026247372,-0.54556181798586*%i-0.31498026247372,0.62996052494744]
这些点依次具有以下参数:1/3, 2/3, 0
z^5 + m*z
[edit | edit source]动态平面
[edit | edit source]z^5 + z
[edit | edit source]
寻找根及其重数


所以根 z=0 的重数为 5。这意味着存在一个具有 4 个花瓣的 花 [26]
around fixed point z=0.
如何计算
(%i23) z:x+y*%i; (%o23) %i*y+x (%i24) realpart(z+z^5); (%o24) 5*x*y^4-10*x^3*y^2+x^5+x (%i25) imagpart(z+z^5); (%o25) y^5-10*x^2*y^3+5*x^4*y+y
在 c 程序中,必须使用临时变量,这样它可以
tempx = 5*x*y*y*y*y-10*x*x*x*y*y + x*x*x*x*x + x ; // temporary variable
y = y*y*y*y*y -10*x*x*y*y*y + 5*x*x*x*x*y + y ;
x=tempx;
它可以进行 优化
"... 逃逸时间算法将花费无限的时间来生成这种类型的图像,因为动力学在那里非常缓慢。如果你想要 1/100 的分辨率,那么通过迭代 f(z)=z+z^5 来将点 z0=0.01 移动到 z=2,大约需要 2*10^8 次迭代。"( 马克·麦克卢尔 [27]
"这幅图显示了 f(z) = z + z^5 的 Julia 集合,它在 z = 0 处有一个无差异的不动点。(f(0) = 0 且 f '(0) = 1。)
4 条线
Re z = 0 and Im z = 0 and Re z = Im z and Re z = -Im z
在 f 的迭代下是不变的。
在 Im z = 0 上:f(x) = x + x^5
在 Re z = 0 上:f(ix) = ix + (ix)^5 = ix + i^5 x^5 = i(x+x^5)
在 Re z = Im z 上,f(z) = r e^(i pi/4) + r^5 e^(i 5 pi/4) = e^ (i pi/4)(r - r^5)
在 Re z = -Im z 上,f(z) = = r e^(i 3pi/4) + r^5 e^(i 15 pi/4) = e^ (i 3pi/4)(r - r^5)
使用一维分析,很容易证明 f(x) = x + x^5 在 x = 0 处有一个排斥不动点,而 f(x) = x - x^5 在 x = 0 处有一个吸引不动点。因此,沿着四条不变线,0 在前两条线上是吸引的,而在后两条线上是排斥的。从 0 排斥出的点以蓝色阴影显示,而吸引到 0 的点以棕色阴影显示。0 有四个吸引花瓣,它们以棕色阴影显示。(一个简单连通区域 C 是一个无差异不动点 p 的花瓣,如果 p 包含在 C 的边界中,并且对于 C 中的每个 z,
F^n(z) -> p (参见 Devaney - 1987)" [28]
6 次方
[edit | edit source]一般情况
[edit | edit source]z^6+A*z+c
[edit | edit source]c=(-6145144-20171676*i) * 2^-25 = (-6145144 - 20171676 i)/2^25 = -0.1831395626068115234375 - 0.60116279125213623046875 i
临界点
-
![Julia set for fc(z)= z^6+A*z+c where c = 4.6875e-1 - 5.703125e-1 *I and A = 6.96854889392852783203125e-2 - 1.07958018779754638671875e-1*I.png]]](//upload.wikimedia.org/wikipedia/commons/thumb/a/a9/Julia_set_for_fc%28z%29%3D_z%5E6%2BA%2Az%2Bc_where_c_%3D_4.6875e-1_-_5.703125e-1_%2AI_and_A_%3D_6.96854889392852783203125e-2_-_1.07958018779754638671875e-1%2AI.png/120px-Julia_set_for_fc%28z%29%3D_z%5E6%2BA%2Az%2Bc_where_c_%3D_4.6875e-1_-_5.703125e-1_%2AI_and_A_%3D_6.96854889392852783203125e-2_-_1.07958018779754638671875e-1%2AI.png) Julia 集合 fc(z)= z^6+A*z+c,其中 c = 4.6875e-1 - 5.703125e-1 *I 且 A = 6.96854889392852783203125e-2 - 1.07958018779754638671875e-1*I.png]]
Julia 集合 fc(z)= z^6+A*z+c,其中 c = 4.6875e-1 - 5.703125e-1 *I 且 A = 6.96854889392852783203125e-2 - 1.07958018779754638671875e-1*I.png]] -

![Julia set for fc(z)= z^6+A*z+c where c = 4.6875e-1 - 5.703125e-1 *I and A = 6.96854889392852783203125e-2 - 1.07958018779754638671875e-1*I.png]]](/wiki/File:Julia_set_for_fc(z)%3D_z%5E6%2BA*z%2Bc_where_c_%3D_4.6875e-1_-_5.703125e-1_*I_and_A_%3D_6.96854889392852783203125e-2_-_1.07958018779754638671875e-1*I.png)
*z%5E2%2B(-0.75%2B0.20988371968269348145i).png)
列表
z = -0.454407 + 0.0918858 I z = -0.227808 - 0.403772 I z = -0.0530308 + 0.460561 I z = 0.313614 - 0.341431 I z = 0.421632 + 0.192756 I
更高精度
+0.4216319827875524 +0.1927564710317439*%i -0.4544068504035357 +0.09188580053693407*%i -0.2278080284907348 -0.4037723222177803*%i +0.3136137458861571 -0.3414308193839966*%i -0.05303084977943909 +0.4605608700330989*%i
z^6+m*z
[edit | edit source]动力学平面
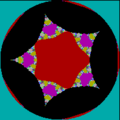
z6+z 在平面 [-1.2;1.2]x[-1.2;1.2] 上。它有 5 个花瓣。 [29]
%3D_z%5E14-z.png)
_%3D_z%5E14_-_z.png)
如何计算迭代
/* Maxima CAS session */ (%i1) z:x+y*%i; (%o1) %i*y+x (%i2) z1:z^14-z; (%o2) (%i*y+x)^14-%i*y-x (%i3) realpart(z1); (%o3) -y^14+91*x^2*y^12-1001*x^4*y^10+3003*x^6*y^8-3003*x^8*y^6+1001*x^10*y^4-91*x^12*y^2+x^14-x (%i4) imagpart(z1); (%o4) 14*x*y^13-364*x^3*y^11+2002*x^5*y^9-3432*x^7*y^7+2002*x^9*y^5-364*x^11*y^3+14*x^13*y-y
f(z)=z^14-z,在 [-1,2;1,2]x[-1,2;1,2] 上有 26 个花瓣。与迈克尔·贝克尔的图像比较。[30]
如何找到不动点
(%i1) z1:z^14-z;
(%o1) z^14-z
(%i2) solve(z1=z);
(%o2) [z=2^(1/13)*%e^((2*%i*%pi)/13),z=2^(1/13)*%e^((4*%i*%pi)/13),
z=2^(1/13)*%e^((6*%i*%pi)/13),z=2^(1/13)*%e^((8*%i*%pi)/13),
z=2^(1/13)*%e^((10*%i*%pi)/13),z=2^(1/13)*%e^((12*%i*%pi)/13),
z=2^(1/13)*%e^(-(12*%i*%pi)/13),z=2^(1/13)*%e^(-(10*%i*%pi)/13),
z=2^(1/13)*%e^(-(8*%i*%pi)/13),z=2^(1/13)*%e^(-(6*%i*%pi)/13),
z=2^(1/13)*%e^(-(4*%i*%pi)/13),z=2^(1/13)*%e^(-(2*%i*%pi)/13),
z=2^(1/13),z=0]
(%i3) multiplicities;
(%o3) [1,1,1,1,1,1,1,1,1,1,1,1,1,1]
(%i4) z2:z1^14-z1;
(%o4) (z^14-z)^14-z^14+z
(%i5) solve(z2=z);
(%o5) [z=2^(1/13)*%e^((2*%i*%pi)/13),z=2^(1/13)*%e^((4*%i*%pi)/13),
z=2^(1/13)*%e^((6*%i*%pi)/13),z=2^(1/13)*%e^((8*%i*%pi)/13),
z=2^(1/13)*%e^((10*%i*%pi)/13),z=2^(1/13)*%e^((12*%i*%pi)/13),
z=2^(1/13)*%e^(-(12*%i*%pi)/13),z=2^(1/13)*%e^(-(10*%i*%pi)/13),
z=2^(1/13)*%e^(-(8*%i*%pi)/13),z=2^(1/13)*%e^(-(6*%i*%pi)/13),
z=2^(1/13)*%e^(-(4*%i*%pi)/13),z=2^(1/13)*%e^(-(2*%i*%pi)/13),
z=2^(1/13),z=0,0=z^78-7*z^65+21*z^52-35*z^39+35*z^26-21*z^13+7,
0=z^78-5*z^65+11*z^52-13*z^39+9*z^26-3*z^13+1]
(%i6) multiplicities;
(%o6) [1,1,1,1,1,1,1,1,1,1,1,1,1,27,1,1]
%3D_z%5E15-z.png)
_%3D_z%5E15_-_z.png)
如何计算迭代
/* Maxima CAS session */ (%i1) z:x+y*%i; (%o1) %i*y+x (%i2) z1:z^15-z; (%o2) (%i*y+x)^15-%i*y-x (%i3) realpart(z1); (%o3) -15*x*y^14+455*x^3*y^12-3003*x^5*y^10+6435*x^7*y^8-5005*x^9*y^6+1365*x^11*y^4-105*x^13*y^2+x^15-x (%i4) imagpart(z1); (%o4) -y^15+105*x^2*y^13-1365*x^4*y^11+5005*x^6*y^9-6435*x^8*y^7+3003*x^10*y^5-455*x^12*y^3+15*x^14*y-y
临界点
(%i1) m:-1;
f:z^15+ m*z;
d:diff(f,z,1);
s:solve(d=0,z)$
s:map(rhs,s)$
s:map(rectform,s)$
s:map('float,s);
multiplicities;
(%o1) -1
(%o2) z^15-z
(%o3) 15*z^14-1
(%o7)
[0.35757475986465*%i+0.74251163973317,
0.64432745317147*%i+0.51383399763062,
0.80346319222004*%i+0.1833852305369,
0.80346319222004*%i-0.1833852305369,
0.64432745317147*%i-0.51383399763062,
0.35757475986465*%i-0.74251163973317,
-0.8241257452789,
-0.35757475986465*%i-0.74251163973317,
-0.64432745317147*%i-0.51383399763062,
-0.80346319222004*%i-0.1833852305369,
0.1833852305369-0.80346319222004*%i,
0.51383399763062-0.64432745317147*%i,
0.74251163973317-0.35757475986465*%i,
0.8241257452789]
(%o8) [1,1,1,1,1,1,1,1,1,1,1,1,1,1]
这意味着这里有 14 个临界点和 14 个临界轨道。
不动点
kill(all);
remvalue(all);
/*------------- functions definitions ---------*/
/* function */
f(z):=z^15 -z;
/* find fixed points returns a list */
GiveFixedPoints():= block
(
[s],
s:solve(f(z)=z),
/* remove "z=" from list s */
s:map('rhs,s),
s:map('rectform,s),
s:map('float,s),
return(s)
)$
compile(all);
ff:GiveFixedPoints();
multiplicities;
length(s);
for i:1 thru length(ff) step 1 do
(z:ff[i],
disp("z= ",z, " abs(d(z))= ",abs(15*z^14-1)));
结果是
(%i12) ff:GiveFixedPoints()
(%o12) [0.45590621928146*%i+0.94669901916834,0.82151462051137*%i+0.65513604843564,1.024411975933374*%i+0.23381534859391,
1.024411975933374*%i-0.23381534859391,0.82151462051137*%i-0.65513604843564,0.45590621928146*%i-0.94669901916834,-1.050756638653219,-
0.45590621928146*%i-0.94669901916834,-0.82151462051137*%i-0.65513604843564,-1.024411975933374*%i-0.23381534859391,0.23381534859391-
1.024411975933374*%i,0.65513604843564-0.82151462051137*%i,0.94669901916834-0.45590621928146*%i,1.050756638653219,0.0]
(%i13) multiplicities
(%o13) [1,1,1,1,1,1,1,1,1,1,1,1,1,1,1]
(%i14) length(s)
(%o14) 14
(%i15) for i thru length(ff) do (z:ff[i],disp("z= ",z," abs(d(z))= ",abs(15*z^14-1)))
z= 0.45590621928146*%i+0.94669901916834 ; abs(d(z))= 28.99999999999996
z= 0.82151462051137*%i+0.65513604843564 ; abs(d(z))= 28.99999999999998
z= 1.024411975933374*%i+0.23381534859391 ; abs(d(z))= 28.99999999999999
z= 1.024411975933374*%i-0.23381534859391 ; abs(d(z))= 28.99999999999997
z= 0.82151462051137*%i-0.65513604843564 ; abs(d(z))= 29.00000000000001
z= 0.45590621928146*%i-0.94669901916834 ; abs(d(z))= 28.99999999999995
z= -1.050756638653219 ; abs(d(z))= 29.00000000000003
z= -0.45590621928146*%i-0.94669901916834; abs(d(z))= 28.99999999999995
z= -0.82151462051137*%i-0.65513604843564; abs(d(z))= 29.00000000000001
z= -1.024411975933374*%i-0.23381534859391 ; abs(d(z))= 28.99999999999997
z= 0.23381534859391-1.024411975933374*%i abs(d(z))= 28.99999999999999
z= 0.65513604843564-0.82151462051137*%i ; abs(d(z))= 28.99999999999998
z= 0.94669901916834-0.45590621928146*%i ; abs(d(z))= 28.99999999999996
z= 1.050756638653219 ; abs(d(z))= 29.00000000000003
z= 0.0 ; abs(d(z))= 1.0
所以只有 z=0 是抛物线不动点,其余都是排斥点
_%3Dz%5E5_%2B(0.8%2B0.8)*z%5E4_%2B_z.png)
描述[33]
- 映射 :
- 系数按升序排列(从 ao 到 an):0,1,0,0, 0.8+0.8i, 1
- ListOfCriticalPoints [(- 0.7558074500261052 %i) - 0.7558074500261052, 0.2793534499540583 %i - 0.5310341598343944, 0.2793534499540583 - 0.5310341598343943 %i, 0.3674881599064412 %i + 0.3674881599064413]
- 不动点 : [(- 0.8 %i) - 0.8, 0.0],稳定性 : [0.6384000000000008, 1.0]

-
 f(z)=z^5+m*z^4+z 的抛物线 Julia 集,其中 m = 0.8+0.4*i
f(z)=z^5+m*z^4+z 的抛物线 Julia 集,其中 m = 0.8+0.4*i -
 临界轨道
临界轨道
%3Dz%5E5%2Bm*z%5E4%2Bz_where_m_%3D_0.8%2B0.4*i.png)
_%3Dz%5E5_%2B(0.8%2B0.4)*z%5E4_%2B_z.svg)
当幂不为 2.0 时,集合的轨道动力学可能会变得更加复杂。迭代函数可以变成 多值,然后集合的结构受到 '任意' 选择 的影响,选择哪个值。
- commons:Category:Complex polynomial maps
- 迭代函数的导数
- Mark McClure : 多项式 Julia 集的可视化,f(z) = an*z^n+ ... + a2*z^2 + a1*z + a0 的系数 a0, a1, a2, a3, ....,例如 : 1.42+0.37i,-1.5,0,1
- 探索四维 Mandelbrot 集
- Clifford A. Reiter 的椭圆曲线 Julia 集
- FF: Julia 集:真实形状和逃逸时间
- ↑ 关于交配的概念,作者:Carsten Lunde Petersen 和 Daniel Meyer
- ↑ 维数和共形动力学 II:几何有限的有理映射,作者:Curtis T McMullen
- ↑ 黎曼球面上复解析动力学,作者:Paul Blanchard
- ↑ Julia 集的逆迭代算法,作者:Mark McClure
- ↑ fractalforums.org:julia-sets-true-shape-and-escape-time
- ↑ fractalforums.org:julia-sets-true-shape-and-escape-time
- ↑ Mark McClure - 评论
- ↑ wikipedia : 多重brot 集
- ↑ 高阶 Mandelbrot 和 Julia 集,作者:Christopher Thomas。图像和 Perl 程序
- ↑ Stephen Haas : 形式为 z^d+c 的多项式 Julia 集的 Hausdorff 维数
- ↑ youtube 上的视频,作者:rrwick
- ↑ Desenvolupament_de_fractals_mitjan
- ↑ 分形生成理论与应用,作者:John Bonobo
- ↑ wolfram : julia-set-explorations
- ↑ C. McMullen,有理映射的自同构。 在`全纯函数和模I`中,31-60,施普林格出版社,1988。
- ↑ McMullen 映射的双曲分量 邱维元,Pascale Roesch,王晓光,尹永成
- ↑ "可视化对称临界点的多项式族的复杂动力学",作者:陈宁a,孙景a,孙燕玲a,唐明b。 混沌,孤子与分形。 第 42 卷,第 3 期,2009 年 11 月 15 日,第 1611–1622 页
- ↑ 平面全纯抛物线胚的拓扑特征 Fr ́ed ́eric Le Roux
- ↑ 一种在全纯动力学中数字可视化刺猬的方法 Alessandro Rosa,图 5.13 第 26 页
- ↑ 一个抛物线 Pommerenke-Levin-Yoccoz 不等式,作者:Xavier Buff 和 Adam L. Epstein,图 1 第 4 页
- ↑ Mandel:实数和复数动力学的软件,作者:Wolf Jung
- ↑ 复杂动力学,Lennart Carleson,Theodore W. Gamelin,施普林格出版社,1993,ISBN 978-0-387-97942-7。 第 40 页,图 2。
- ↑ F. Bracci,一维微分同胚的局部全纯动力学。 现代数学 525,(2010),1-42。 2007/08 学年博士课程笔记。
- ↑ 复杂动力学,Lennart Carleson,Theodore W. Gamelin,施普林格出版社,1993,ISBN 978-0-387-97942-7。 第 41 页
- ↑ Mark McClure 在 stackexchange 问题中:什么是抛物线临界轨道的形状
- ↑ 一种在全纯动力学中数字可视化刺猬的方法 Alessandro Rosa
- ↑ stackexchange 问题:什么是抛物线临界轨道的形状
- ↑ 分形,作者:安妮·伯恩斯,数学系,C.W. Post 校区,纽约州立大学
- ↑ 一些 Julia 集 2,作者:Michael Becker
- ↑ 不动点和周期点,作者:Michael Becker
- ↑ multibrot,作者:Claude
- ↑ z^2 +cz^5
- ↑ math.stackexchange 问题:吸引域和直接吸引域之间有什么区别