 一个极坐标网格,几个角度用度数标记
一个极坐标网格,几个角度用度数标记
极坐标系是一个二维坐标系,其中平面上的每个点由一个角度和一个距离确定。极坐标系在关系可以用角度和距离最容易表达的情况下特别有用;在更熟悉的笛卡尔坐标系或直角坐标系中,这种关系只能通过三角公式找到。
由于坐标系是二维的,因此每个点由两个极坐标确定:径向坐标和角度坐标。径向坐标(通常表示为  )表示点到中心点(称为极点,相当于笛卡尔系统中的原点)的距离。角度坐标(也称为极角或方位角,通常表示为
)表示点到中心点(称为极点,相当于笛卡尔系统中的原点)的距离。角度坐标(也称为极角或方位角,通常表示为  或
或  )表示从 0° 射线(有时称为极轴)到达该点所需的角度,该射线相当于笛卡尔坐标平面上的正
)表示从 0° 射线(有时称为极轴)到达该点所需的角度,该射线相当于笛卡尔坐标平面上的正  轴。
轴。
 在极坐标系中的点 (3,60°) 和 (4,210°)
在极坐标系中的点 (3,60°) 和 (4,210°)
极坐标系中的每个点都可以用两个极坐标来描述,它们通常被称为 (径向坐标)和 θ(角度坐标,极角或方位角,有时表示为  或 )。 坐标表示点到极点的径向距离,θ 坐标表示从
或 )。 坐标表示点到极点的径向距离,θ 坐标表示从  射线(有时称为极轴)的逆时针角度,即笛卡尔坐标平面上的正 轴。
射线(有时称为极轴)的逆时针角度,即笛卡尔坐标平面上的正 轴。
例如,极坐标  将被绘制为一个点,它距离极点 3 个单位,位于
将被绘制为一个点,它距离极点 3 个单位,位于  射线上。坐标
射线上。坐标  也将绘制在该点,因为负径向距离被测量为在相反射线上的正距离(关于原点反射的射线,与原始射线相差
也将绘制在该点,因为负径向距离被测量为在相反射线上的正距离(关于原点反射的射线,与原始射线相差  )。
)。
极坐标系的一个重要方面,笛卡尔坐标系中没有,就是同一个点可以用无穷多个不同的坐标表示。这是因为绕中心极点旋转任意多次都不会影响实际绘制的点的实际位置。一般来说,点  可以表示为
可以表示为  或
或  ,其中
,其中  是任何整数。
是任何整数。
约定使用任意坐标  来表示极点,因为无论 θ 坐标如何,半径为 0 的点始终在极点上。为了得到点的唯一表示,通常将 限制为负数和非负数
来表示极点,因为无论 θ 坐标如何,半径为 0 的点始终在极点上。为了得到点的唯一表示,通常将 限制为负数和非负数  以及 到区间
以及 到区间  或
或 ![{\displaystyle (-180^{\circ },180^{\circ }]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/52564e11cb8ecd24997d7929ef3ff9a87052b335) (或者用弧度表示,
(或者用弧度表示, 或
或 ![{\displaystyle (-\pi ,\pi ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7fbb1843079a9df3d3bbcce3249bb2599790de9c) )。
)。
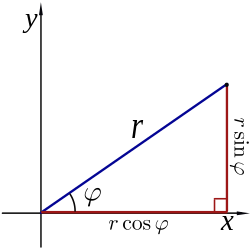
极坐标表示中的角度通常以度数或弧度表示,使用转换  。选择在很大程度上取决于上下文。导航应用使用度数测量,而一些物理应用(特别是旋转力学)和几乎所有关于微积分的数学文献都使用弧度测量。
。选择在很大程度上取决于上下文。导航应用使用度数测量,而一些物理应用(特别是旋转力学)和几乎所有关于微积分的数学文献都使用弧度测量。
 说明转换公式的图
说明转换公式的图
两个极坐标  可以通过使用三角函数正弦和余弦转换为笛卡尔坐标
可以通过使用三角函数正弦和余弦转换为笛卡尔坐标 


尽管两个笛卡尔坐标 可以转换为极坐标 ,但
 (通过简单的勾股定理应用)。
(通过简单的勾股定理应用)。
为了确定角坐标 ,需要考虑以下两种情况:
- 当
 时, 可以取任何实数。
时, 可以取任何实数。
- 当
 时,为了获得 的唯一表示,它必须限制在大小为
时,为了获得 的唯一表示,它必须限制在大小为  的区间内。 通常选择这样的区间为 和 。
的区间内。 通常选择这样的区间为 和 。
为了在区间 内获得 ,可以使用以下公式( 表示正切函数的反函数)
表示正切函数的反函数)

为了在区间 内获得 ,可以使用以下公式:

可以使用 atan2 函数来避免跟踪分子和分母的符号,该函数对分子和分母有单独的参数。
用极坐标表示的代数曲线的定义方程称为极坐标方程。在许多情况下,这样的方程可以通过定义 作为 的函数来简单地指定。然后,由此产生的曲线将包含形式为  的点,并且可以看作是极坐标函数 的图形。
的点,并且可以看作是极坐标函数 的图形。
可以从极坐标函数 的方程推导出不同的对称形式。如果  ,则曲线将关于水平
,则曲线将关于水平  射线对称;如果
射线对称;如果  ,则它将关于垂直
,则它将关于垂直  射线对称;如果
射线对称;如果  ,则它将围绕极点逆时针旋转
,则它将围绕极点逆时针旋转  对称。
对称。
由于极坐标系的圆形性质,许多曲线可以用一个相当简单的极坐标方程来描述,而它们的笛卡尔形式则要复杂得多。其中最著名的曲线包括极坐标玫瑰、阿基米德螺旋线、双纽线、心脏线和心形线。
对于下面的圆、线和极坐标玫瑰,可以理解,曲线没有对域和范围的限制。
 一个圆的方程为
一个圆的方程为 
以  为圆心,半径为
为圆心,半径为  的圆的一般方程为
的圆的一般方程为

此方程可以以多种方式简化,以适应更具体的案例,例如方程

用于以极点为圆心,半径为 的圆。
径向直线(那些穿过极点的直线)由方程表示

其中 是直线的仰角;也就是说, 其中
其中  是直线在笛卡尔坐标系中的斜率。垂直穿过径向线
是直线在笛卡尔坐标系中的斜率。垂直穿过径向线  于点 的非径向直线具有方程
于点 的非径向直线具有方程

 具有方程
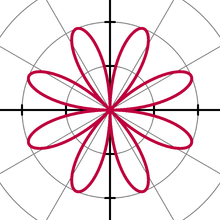
具有方程  的极坐标玫瑰线
的极坐标玫瑰线
极坐标玫瑰线是一种著名的数学曲线,它看起来像一朵花瓣花,可以用一个简单的极坐标方程来表示。

对于任何常数  (包括 0)。如果 是一个整数,这些方程将产生一个 瓣玫瑰,如果 是奇数,或者一个
(包括 0)。如果 是一个整数,这些方程将产生一个 瓣玫瑰,如果 是奇数,或者一个  瓣玫瑰,如果 是偶数。如果 是有理数但不是整数,可能会形成玫瑰状的形状,但花瓣会重叠。请注意,这些方程永远不会定义一个有 2、6、10、14 等花瓣的玫瑰。变量 代表玫瑰花瓣的长度。
瓣玫瑰,如果 是偶数。如果 是有理数但不是整数,可能会形成玫瑰状的形状,但花瓣会重叠。请注意,这些方程永远不会定义一个有 2、6、10、14 等花瓣的玫瑰。变量 代表玫瑰花瓣的长度。
 一个阿基米德螺旋线,其方程为
一个阿基米德螺旋线,其方程为  ,其中
,其中 
阿基米德螺旋线是一种著名的螺旋线,由阿基米德发现,也可以用简单的极坐标方程表示。它由以下方程表示

改变参数 将旋转螺旋线,而  控制臂之间的距离,对于给定的螺旋线,该距离始终是常数。阿基米德螺旋线有两条臂,一条对于
控制臂之间的距离,对于给定的螺旋线,该距离始终是常数。阿基米德螺旋线有两条臂,一条对于  ,另一条对于
,另一条对于  。两条臂在极点处平滑连接。将一条臂沿
。两条臂在极点处平滑连接。将一条臂沿  线镜像将产生另一条臂。该曲线值得注意的是,它是在 圆锥曲线 之后第一个在数学论文中描述的曲线之一,也是用极坐标方程定义的曲线的典型例子。
线镜像将产生另一条臂。该曲线值得注意的是,它是在 圆锥曲线 之后第一个在数学论文中描述的曲线之一,也是用极坐标方程定义的曲线的典型例子。
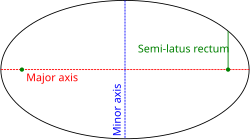 椭圆,显示半正弦径
椭圆,显示半正弦径
圆锥曲线,其中一个焦点在极点上,另一个焦点在 射线上(因此圆锥曲线的半长轴位于极轴上),由以下公式给出

其中  是偏心率,而
是偏心率,而  是半正弦(焦点到曲线在长轴上的垂线距离)。
是半正弦(焦点到曲线在长轴上的垂线距离)。
- 如果
 ,此方程定义的是双曲线。
,此方程定义的是双曲线。
- 如果
 ,它定义的是抛物线。
,它定义的是抛物线。
- 如果
 ,它定义的是椭圆。特殊情况
,它定义的是椭圆。特殊情况  后者得到半径为 的圆。
后者得到半径为 的圆。





.PNG)

