 具有充电部分、放电部分和两个开关的完整电路
具有充电部分、放电部分和两个开关的完整电路
 充电电路(sw1闭合,sw2打开)
充电电路(sw1闭合,sw2打开)
 放电电路(sw1打开,sw闭合)
放电电路(sw1打开,sw闭合)
电源电压可以是直流电。在这种情况下,初始电容器电压将为 Vs,电压的导数将为零。
电源电压可以是交流电,在这种情况下,开关切换的确切时间或更精确的相位角将决定 Vs 和电压值的导数。
初始电感器电流将为零,导数将为零。
经过很长时间后,将不再有任何活动。稳态特解将为零。
电流将贯穿始终保持一致。目标应该是找到电流的表达式。然而,任何电压也可以被找到,然后是电流。无关紧要。
总之,放电电路中将没有初始电流,电容器两端将有电压。电感器将在 t=0+ 时表现得像开路,因此整个电压将出现在电感器两端,并立即(在 t=0- 和 t=0+ 之间)引起电感器电流导数的变化。
一阶电路电流方程为

然而,这是一个二阶电路(同时包含电容器和电感器),因此

复频率 s 替换了 tau。时间常数的概念消失了。s 的直观解释存在,但更复杂。记住

回到复频率域以找到时间常数。从回路方程开始

将 Vr 和 VL 的端子方程代入,但不要代入 Vc,因为想要避免积分

从电容器的端子关系可知

因此代入后,得到 Vc 的微分方程

现在可以看到二阶了。
零点就像时间常数,但可能存在多个零点。它们可能对电路的影响各不相同。
需要找到 Vc。特解(稳态)将为零。(零点的名称来源)。
齐次解将具有以下形式

代入微分方程

除以 Aest 得到


该方程的零点为

根据您对二次方程的经验,您知道1,2有三种类型的配对
| 配对类型 |
Vc的修正方程 |
解释 |
| 实数,不相等 |
 |
过阻尼 |
| 相等 |
 |
临界阻尼 |
| 复数 |
 ) ) |
欠阻尼
|
修正方程(猜测)来自数学证明,一些课程从拉普拉斯变换推导出这些方程。只需记住这张表。
有两个储能元件,每个元件有两个初始条件,因此可能有四个方程和四个常数。A1和A2是其中的两个。
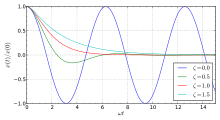 无阻尼(蓝色)、欠阻尼(绿色)、临界阻尼(红色)和过阻尼(青色)情况
无阻尼(蓝色)、欠阻尼(绿色)、临界阻尼(红色)和过阻尼(青色)情况
要理解阻尼,想象一辆汽车驶过路边石。无阻尼意味着汽车会永远上下弹跳。欠阻尼是指当减震器开始漏油时发生的情况(汽车会上下弹跳一段时间……就像乘船一样)。临界阻尼是为什么人们讨厌跑车(会震动他们的屁股)。汽车的过阻尼响应会给驾驶员反馈。上面这样的电路已被用来模拟减震器。这些电路被称为模拟计算机.
 R和L对共振的影响
R和L对共振的影响
以上三种中最有趣的是欠阻尼。会发生类似共振的现象。
卫星会根据哪一面朝向太阳或2.7开尔文的太空而膨胀和收缩。重复的膨胀和收缩会产生振荡,需要通过一个电机来抑制,该电机会旋转一个重量来抑制振动。否则,任何可以摆动的东西都会越来越剧烈地摆动,直到部件开始脱落。(地球上的汽车也不例外)。
大多数控制电路输入都是不平衡的。输出模拟所需的行为。校正(反馈控制)电路(此处未讨论)会介入以确保实际行为与所需行为匹配。最常的做法是设计一个临界阻尼电路,而不是仅仅预测将要发生的事情。
当s1和s2是纯虚数时,会发生共振(或接近共振)。
因此

有趣的是根号项。它决定了二阶响应的性质。
当二次方程解的实部为零时,就会发生纯共振,这只会发生在R<<L时。
 晶体用一个电容并联一个串联RLC网络来建模
晶体用一个电容并联一个串联RLC网络来建模
根号项的内容不必为零,只要实部为零,就可以是过阻尼的


j抵消了,我们已经假设了R<<L,所以

称为阻尼频率、振铃频率或无阻尼频率。
当R<<L时,它会变成共振频率

机械工程师试图预测给定结构和材料的 ω。它可以是建筑物或电机支架。数学证明了 ω 的存在。找到精确的 ω 通常需要测试。机械工程师用弹簧和阻尼器来模拟所有东西,而不是电容和电感。找到 ω 可能很困难。这就是为什么存在整个行业的 振动台。
结构中的弹簧和阻尼器值决定了共振的宽度或衰减程度。在设计建筑物时,机械工程师希望外壳尽可能宽而平坦(衰减)。在设计陷波滤波器时,电子工程师的设计目标恰恰相反:高而窄的外壳。电子工程师称之为 品质因数。
如今,大多数振荡器都是用 晶体 制成的。






