
控制系统/反馈回路
反馈回路是设计控制系统时一种常见且强大的工具。反馈回路考虑了系统输出,使系统能够调整其性能以满足所需的输出响应。
在谈论控制系统时,重要的是要记住,工程师通常会得到现有的系统,例如执行器、传感器、电机和其他具有设定参数的设备,并被要求调整这些系统的性能。在许多情况下,可能无法打开系统(“对象”)并从内部进行调整:需要对系统外部进行修改,以迫使系统响应按预期方式运作。这是通过在系统中添加控制器、补偿器和反馈结构来实现的。

这是一个基本的反馈结构。在这里,我们使用系统的输出值来帮助我们准备下一个输出值。这样,我们就可以创建能够纠正错误的系统。在这里,我们看到一个值为一的反馈回路。我们称之为单位反馈。
以下是一些将在以下部分中使用的相关词汇列表
- 对象
- 术语“对象”是从化学工程中借用的,指的是主要的系统过程。对象是预先存在的系统,如果没有控制器的帮助,它将无法满足给定的规格。对象通常是“现有的”,并且不可更改。在上图中,对象用 P 表示。
- 控制器
- 控制器或“补偿器”是添加到对象中的一个附加系统,以控制对象的运行。系统可以有多个补偿器,它们可以出现在系统的任何地方:在取样节点之前,在求和器之后,在对象之前或之后,以及在反馈回路中。在上图中,我们的补偿器用 C 表示。
- 求和器
- 求和器是系统图上的一个符号(在上图中用括号表示),它在概念上将两个或多个输入信号相加,并产生一个单一的和输出信号。
- 取样节点
- 取样节点仅仅是线路上分支的代名词。
- 前向通路
- 反馈回路中的前向通路是求和器之后,穿过对象并走向系统输出的通路。
- 反向通路
- 反向通路是取样节点之后,循环回系统开始的通路。这也被称为“反馈通路”。
- 单位反馈
- 当反馈通路的乘法值为 1 时。
事实证明,负反馈几乎总是最有用的反馈类型。当我们将输出值从输入值(我们期望的值)中减去时,我们得到一个称为误差信号的值。误差信号显示了我们的输出与我们期望的输入相差多远。
正反馈具有信号倾向于自我增强并变大的特性。在正反馈系统中,来自系统的噪声被加回到输入,这反过来又会产生更多噪声。作为一个正反馈系统的例子,考虑一个带有扬声器和麦克风的音频放大系统。将麦克风放置在扬声器附近会创建一个正反馈回路,结果是声音变得越来越响亮。由于大多数电气系统中的噪声都是高频的,因此系统的声输出会变得尖锐。
在上一章中,我们向您展示了这张图片

现在,我们将推导出 I/O 关系到状态空间方程。如果我们检查最里面的反馈回路,我们可以看到前向通路有一个积分器系统,,反馈回路具有矩阵值 A。如果我们只取这个回路的传递函数,我们会得到


用因子 B 左乘,用 C 右乘,我们得到整个下半部分回路的传递函数

我们可以看到上通路(D)和下通路 Tlower 相加在一起产生最终结果

现在,对于另一种方法,我们可以假设x' 是最里面的反馈回路的值,位于积分器之前。这是有道理的,因为x' 的积分应该是x(从图中我们可以看到它确实是这样的。用u 作为输入,解出x',我们得到

这是因为来自反馈分支的值等于值 **x** 乘以反馈回路矩阵 A,而来自求和器左侧的值等于输入 **u** 乘以矩阵 B。
如果我们用 **x** 和 **u** 来表示,我们可以看到系统输出是 **u** 乘以前馈值 D 和 **x** 的值乘以值 C 的总和。

最后两个方程正是我们系统的状态空间方程。
反馈回路传递函数
[edit | edit source]我们可以通过一系列方程来求解系统的输出。


当我们解出 Y(s) 时,得到
[反馈传递函数]

鼓励读者自己使用上述方程推导出结果。
函数 E(s) 被称为 **误差信号**。误差信号是系统输出 (Y(s)) 和系统输入 (X(s)) 之间的差。请注意,误差信号现在是系统 G(s) 的直接输入。X(s) 现在被称为 **参考输入**。负反馈回路的目的是通过识别 X(s) 和 Y(s) 之间的较大差异并对其进行校正,使系统输出等于系统输入。
示例:电梯
[edit | edit source]这是一个关于参考输入和反馈系统的简单示例。
某栋楼里有一部电梯,有 5 层楼。按下按钮“1”会把你送到一楼,按下按钮“5”会把你送到五楼,等等。为了简单起见,一次只能按一个按钮。
按下特定的按钮是系统的参考输入。按下“1”会给系统一个参考输入 1,按下“2”会给系统一个参考输入 2,等等。然后,电梯系统试图使输出(电梯的物理楼层位置)与参考输入(在电梯中按下的按钮)匹配。误差信号 e(t) 表示参考输入 x(t) 和时间 t 时电梯的物理位置 y(t) 之间的差异。
假设电梯在一楼,并且在时间 t0 时按下了按钮“5”。然后参考输入成为一个阶跃函数。

我们在“楼层”单位中测量。在时间 t0 时,误差信号为

这意味着电梯需要向上行驶 4 层。在时间 t1 时,当电梯在二楼时,误差信号为

这意味着电梯还有 3 层要走。最后,在时间 t4 时,当电梯到达顶层时,误差信号为

当误差信号为零时,电梯停止移动。本质上,我们可以定义三种情况。
- e(t) 为正数:在这种情况下,电梯向上移动一层,然后再次检查。
- e(t) 为零:电梯停止。
- e(t) 为负数:电梯向下移动一层,然后再次检查。
状态空间反馈回路
[edit | edit source]在状态空间表示中,工厂通常由状态空间方程定义。


该系统被认为是预先存在的,矩阵 A、B、C 和 D 被认为是系统内部的(因此不可更改)。此外,在典型的系统中,状态变量要么是虚构的(表示为虚拟变量),要么是不可测量的。出于这些原因,我们需要向系统添加外部组件,例如增益元件或反馈元件,以提高性能。
考虑在系统输入端添加增益矩阵 K,以及一个负反馈元件 F,该元件乘以系统输出 y 并添加到系统的输入信号中。有两种情况
- 反馈元件 F 在乘以增益矩阵 K 之前从输入中减去。
- 反馈元件 F 在乘以增益矩阵 K 之后从输入中减去。
在情况 1 中,反馈元件 F 在将增益乘以输入之前添加到输入中。如果 v 是整个系统的输入,那么我们可以定义 u 为

在情况 2 中,反馈元件 F 在将增益乘以输入之后从输入中减去。如果 v 是整个系统的输入,那么我们可以定义 u 为

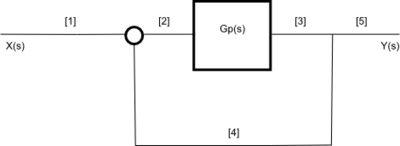
开环与闭环
[edit | edit source]
假设我们有上面所示的广义系统。顶部部分,Gp(s) 表示所有正向路径上的系统和控制器。底部部分,Gb(s) 表示系统中所有反馈处理元件。系统开头的字母“K”称为**增益**。我们将在后面的章节中更多地讨论增益。我们可以定义**闭环传递函数**如下
[闭环传递函数]

如果我们“打开”循环,并断开反馈节点,我们可以定义**开环传递函数**,如下所示
[开环传递函数]

我们可以根据这个开环传递函数重新定义闭环传递函数

这些结果很重要,它们将在本书的其余部分中使用,无需进一步解释或推导。
控制器的放置
[edit | edit source]我们可以将附加控制器放置在许多不同的位置。
- 在系统前面,在反馈回路之前。
- 在反馈回路内,在正向路径上,在系统之前。
- 在正向路径上,在系统之后。
- 在反馈回路内,在反向路径上。
- 在反馈回路之后。

每个位置都有一定的优点和缺点,希望我们有机会讨论所有这些。
二阶系统
[edit | edit source]二阶系统的传递函数的通用表达式表示为

其中 和 分别是系统的阻尼比和固有频率。


阻尼比
[edit | edit source]阻尼比由符号 定义。阻尼比让我们了解瞬态响应的性质,详细说明了系统将经历的超调和振荡量。这与时间缩放无关。
如果
- = 零,则系统无阻尼;
- < 1,系统处于欠阻尼状态;
- = 1,系统处于临界阻尼状态;
- > 1,系统处于过阻尼状态。
用于结合自然频率确定系统属性。要找到zeta值,您必须先找到自然响应!
自然频率
[edit | edit source]自然频率,用 表示,定义为如果系统没有阻尼,它将以什么频率振荡,我们将阻尼比定义为。
