本节介绍如何形成描述弹簧上质量位置的方程。
对于一个由质量 *m* 连接到弹簧一端(弹簧常数为 *s*)的简单振荡器,恢复力 *f* 可以用以下公式表示:

其中 *x* 是质量相对于静止位置的位移。将 *f* 的表达式代入线性动量方程,

其中 *a* 是质量的加速度,我们可以得到

或者,

注意,振荡频率  由以下公式给出:
由以下公式给出:

为了解该方程,我们可以假设

则力方程变为

得到方程

解方程求解 

这得出了 *x* 的方程为

注意

以及 *C1* 和 *C2* 是由系统初始条件决定的常数
如果质量在 *t* = 0 时的位置表示为 *x0*,那么

如果质量在 *t* = 0 时的速度表示为 *u0*,那么

解这两个边界条件方程得到


然后位置由下式给出

此方程也可以通过假设 *x* 具有以下形式找到

并应用相同的初始条件,


这导致了相同的位移方程
返回主页
如果A1和A2是以下形式


那么位移方程可以写成

通过应用初始条件 (x(0)=x0, u(0)=u0) 可以发现


如果将这两个方程平方后相加,则可以发现

如果找到这两个相同方程的差,则结果是

位移方程也可以写成虚位移方程的实部
![{\displaystyle \mathbf {Re} [x(t)]=x(t)=Acos(\omega _{0}t-\phi )\,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/15c427c7cb9287e21e410751fb6ab22afe553eb7)
根据欧拉公式 (ejφ = cosφ + jsinφ),x(t) 具有以下形式

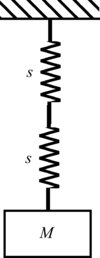
- 示例 1.1
已知: 两个弹簧的刚度为  ,两个物体的质量为
,两个物体的质量为 
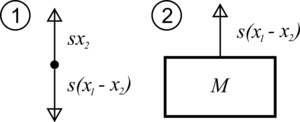
求解: 以下系统草图的固有频率
-
 简谐振荡器-1.2.1.a
简谐振荡器-1.2.1.a



-
 简谐振荡器-1.2.1.b
简谐振荡器-1.2.1.b


-
 简单振荡器-1.2.1.c
简单振荡器-1.2.1.c





-
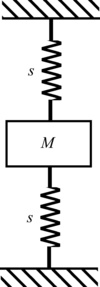 简单振荡器-1.2.1.d
简单振荡器-1.2.1.d


返回主页






